【路径规划】基于A*算法和Dijkstra算法的路径规划(Python代码实现)
Dijkstra算法是Edsger Wybe Dijkstra在1956年提出的一种用来寻找图形中结点之间最短路径的算法。Dijkstra算法的基本思想是贪心思想,主要特点是以起始点为中心向外层层扩展,直到扩展到目标点为止。A*算法发表于1968年,A*算法是将Dijkstra算法与广度优先搜索算法(BFS)二者结合而成,通过借助启发式函数的作用,能够使该算法能够更快的找到最优路径。A算法是静态路
👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
Dijkstra算法是Edsger Wybe Dijkstra在1956年提出的一种用来寻找图形中结点之间最短路径的算法。Dijkstra算法的基本思想是贪心思想,主要特点是以起始点为中心向外层层扩展,直到扩展到目标点为止。
A*算法发表于1968年,A*算法是将Dijkstra算法与广度优先搜索算法(BFS)二者结合而成,通过借助启发式函数的作用,能够使该算法能够更快的找到最优路径。A算法是静态路网中求解最短路径最有效的直接搜索方法。
基于A*算法与Dijkstra算法的路径规划研究
一、算法基本原理与实现步骤
- A*算法
A*算法是一种启发式搜索算法,结合了Dijkstra算法的广度优先特性与最佳优先搜索的目标导向性。其核心公式为:
f(n)=g(n)+h(n)
其中,g(n)是从起点到当前节点的实际成本,h(n)是当前节点到目标的启发式估计成本。算法通过维护OPEN列表(待扩展节点)和CLOSED列表(已扩展节点)实现高效搜索。
实现步骤:
- 初始化OPEN列表,加入起点并计算f(n)。
- 从OPEN列表中取出f(n)最小的节点,加入CLOSED列表。
- 若当前节点为目标节点,回溯路径;否则扩展其相邻节点,更新g(n)和f(n),并重新排序OPEN列表。
- Dijkstra算法
Dijkstra算法是一种单源最短路径算法,基于贪心策略,通过逐步松弛边权值计算从起点到所有节点的最短路径。其核心数据结构为优先队列(通常用堆实现),时间复杂度优化后可达O((V+E)logV)。
实现步骤:
- 初始化距离数组dis[N]dis[N],标记起点的距离为0,其余为无穷大。
- 从未处理的节点中选择距离最小的节点,更新其邻接节点的最短距离。
- 重复直到所有节点处理完毕。
二、优缺点对比分析
| 维度 | A*算法 | Dijkstra算法 |
|---|---|---|
| 效率 | 在启发式函数h(n)h(n)有效时,搜索节点数显著减少,速度更快。 | 需遍历所有可能路径,处理大规模图时效率较低。 |
| 适用场景 | 目标明确的单源单目标路径规划(如游戏寻路、机器人导航)。 | 单源到所有节点的最短路径计算(如网络路由、交通规划)。 |
| 启发式依赖 | 依赖h(n)h(n)的准确性,若估计不乐观(即h(n)>h∗(n)h(n)>h∗(n)),可能无法找到最优解。 | 无需启发式函数,保证全局最优性。 |
| 动态适应性 | 需重新计算路径,难以直接处理动态障碍物。 | 同样不擅长动态环境,但可通过增量更新优化。 |
三、典型应用场景
-
A*算法
- 游戏开发:在《魔兽世界》等游戏中实现NPC自动寻路。
- 机器人导航:结合栅格地图和曼哈顿距离,规划无碰撞路径。
- 物流优化:在风电场道路选线中自动生成主路径和支路。
- 三维路径规划:通过导航网格(NavMesh)减少拐角点,优化船舶或无人机路径。
-
Dijkstra算法
- 交通网络规划:计算城市道路网中多个目的地的最短路径。
- 网络路由协议:路由器确定数据包转发的最优路径。
- 资源分配:在项目管理中建模任务节点,优化资源调度。
- 移动机器人离线规划:与蚁群算法融合,解决复杂环境避障问题。
四、实际案例对比分析
-
移动机器人路径规划实验
- Dijkstra算法:计算从起点到所有顶点的最短路径,导致大量冗余计算(例如远离目标的节点)。
- A*算法:通过启发式函数优先扩展接近目标的节点,搜索效率提升30%以上。
-
交通路网仿真
- 在节点数超过10,000的稠密图中,A*算法的时间复杂度为O(1.2VlogV),而Dijkstra为O(2.5VlogV)。
- 动态交通场景下,A*算法结合实时传感器数据调整路径,响应速度更快。
五、时间复杂度与空间复杂度
| 算法 | 时间复杂度 | 空间复杂度 | 关键影响因素 |
|---|---|---|---|
| A*算法 | 最坏O((V+E)logV),实际更优 | O(V) | 启发式函数质量、图结构稀疏性 |
| Dijkstra算法 | O((V+E)logV)(堆优化版本) | O(V) | 图的稠密度、优先队列实现方式 |
六、未来研究方向
- 混合算法开发:结合A*的启发式优势与Dijkstra的全局最优性,用于动态多目标路径规划。
- 启发式函数优化:引入机器学习模型动态调整h(n)h(n),提升复杂环境下的适应性。
- 并行计算优化:利用GPU加速大规模图的节点扩展过程,降低实时应用延迟。
七、结论
A*算法与Dijkstra算法在路径规划中各有千秋:
- A*算法凭借启发式引导,在目标明确的场景下效率显著占优,尤其适用于实时性要求高的应用(如游戏、机器人)。
- Dijkstra算法则以全局最优性见长,适合需要计算多目标最短路径的静态网络(如交通、通信)。
实际选择需综合考虑问题规模、动态性需求与计算资源限制。
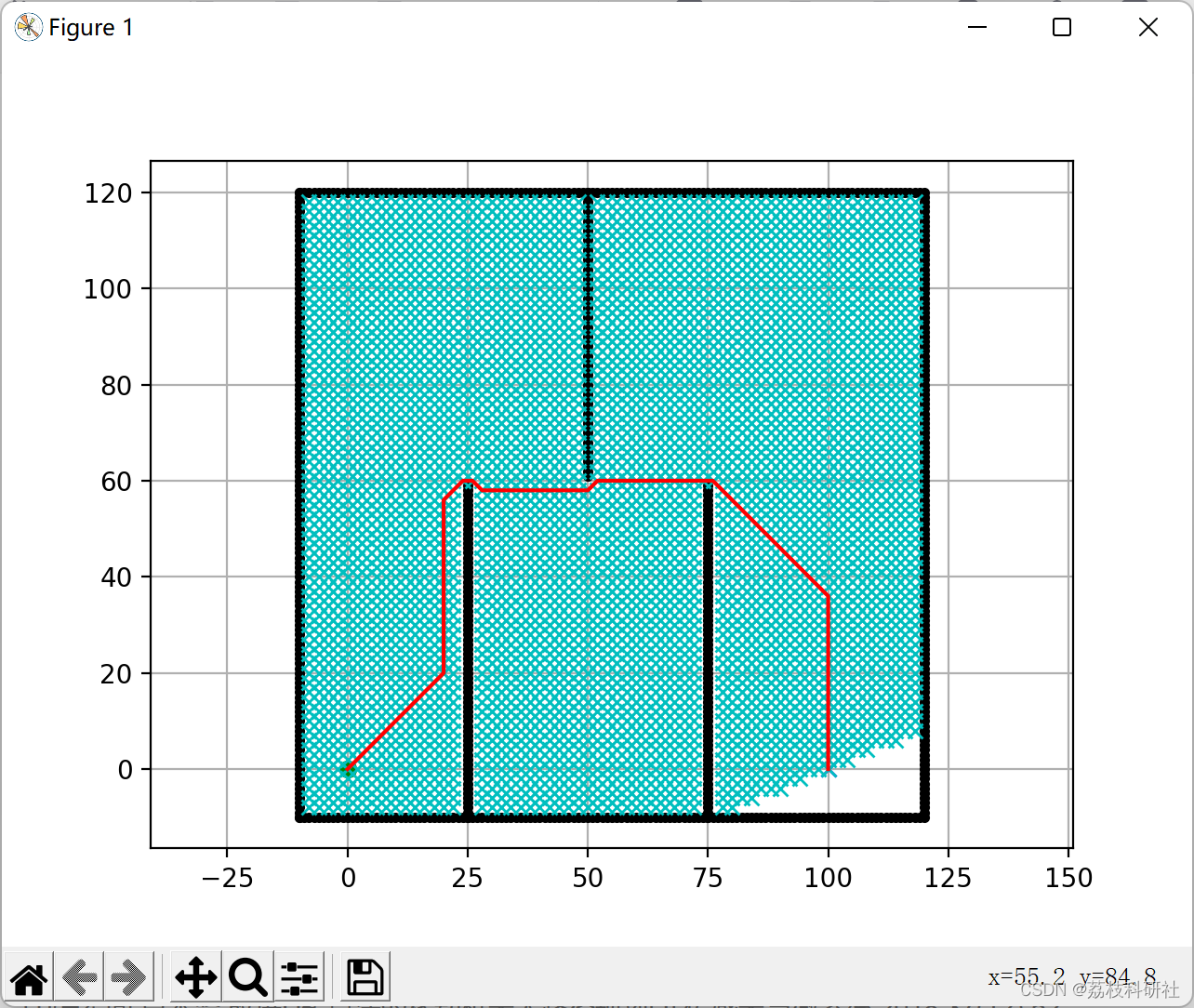
📚2 运行结果
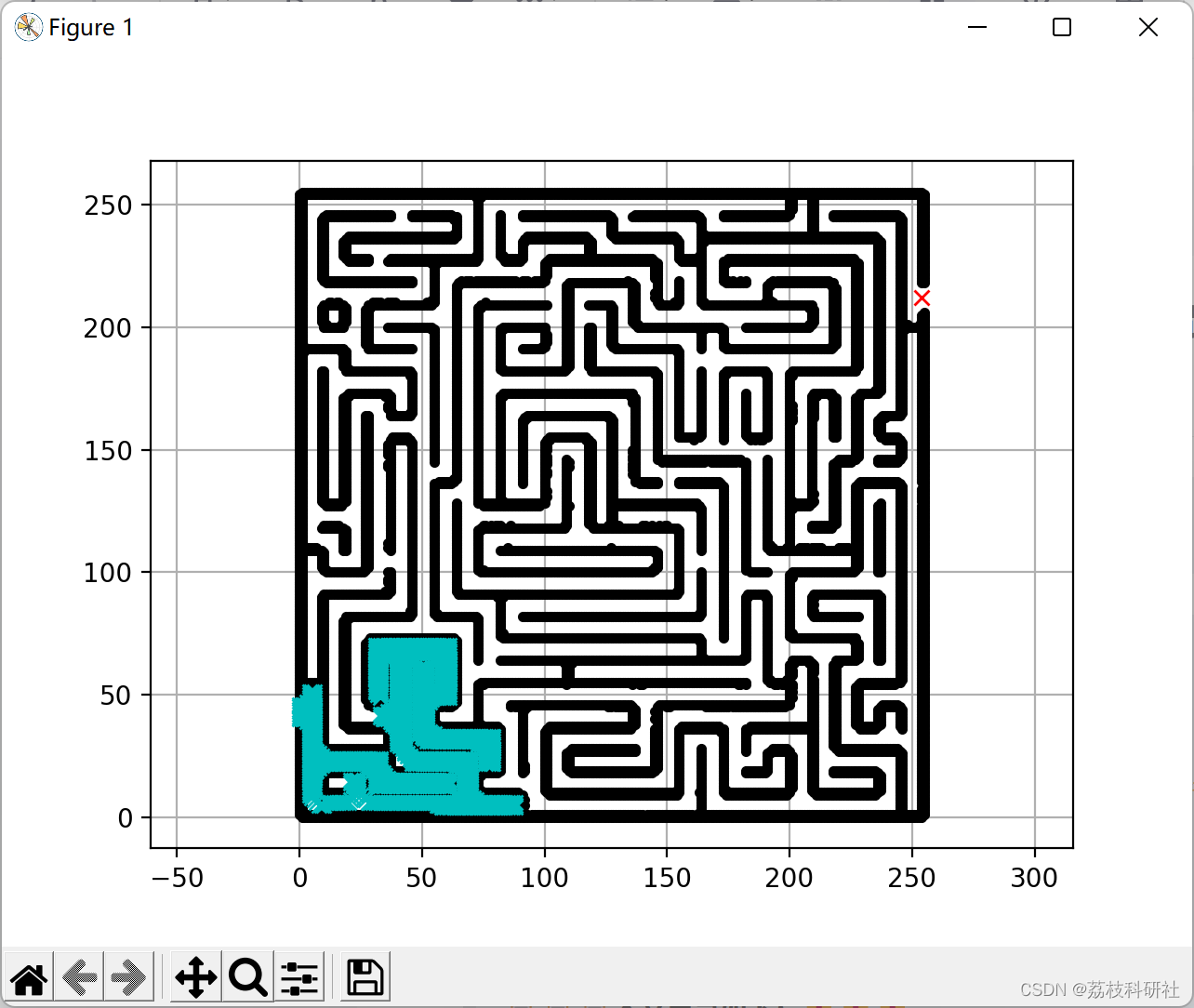
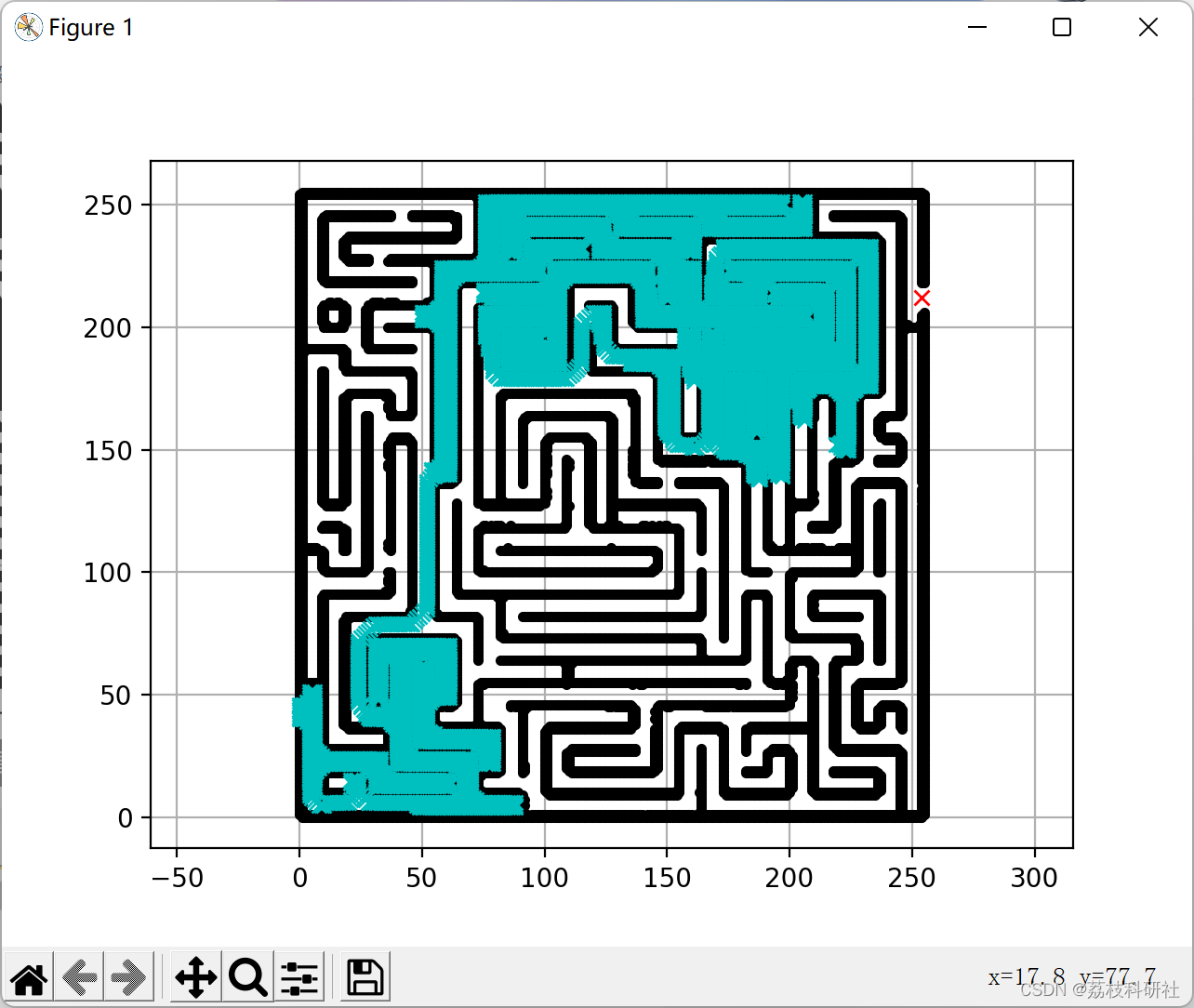
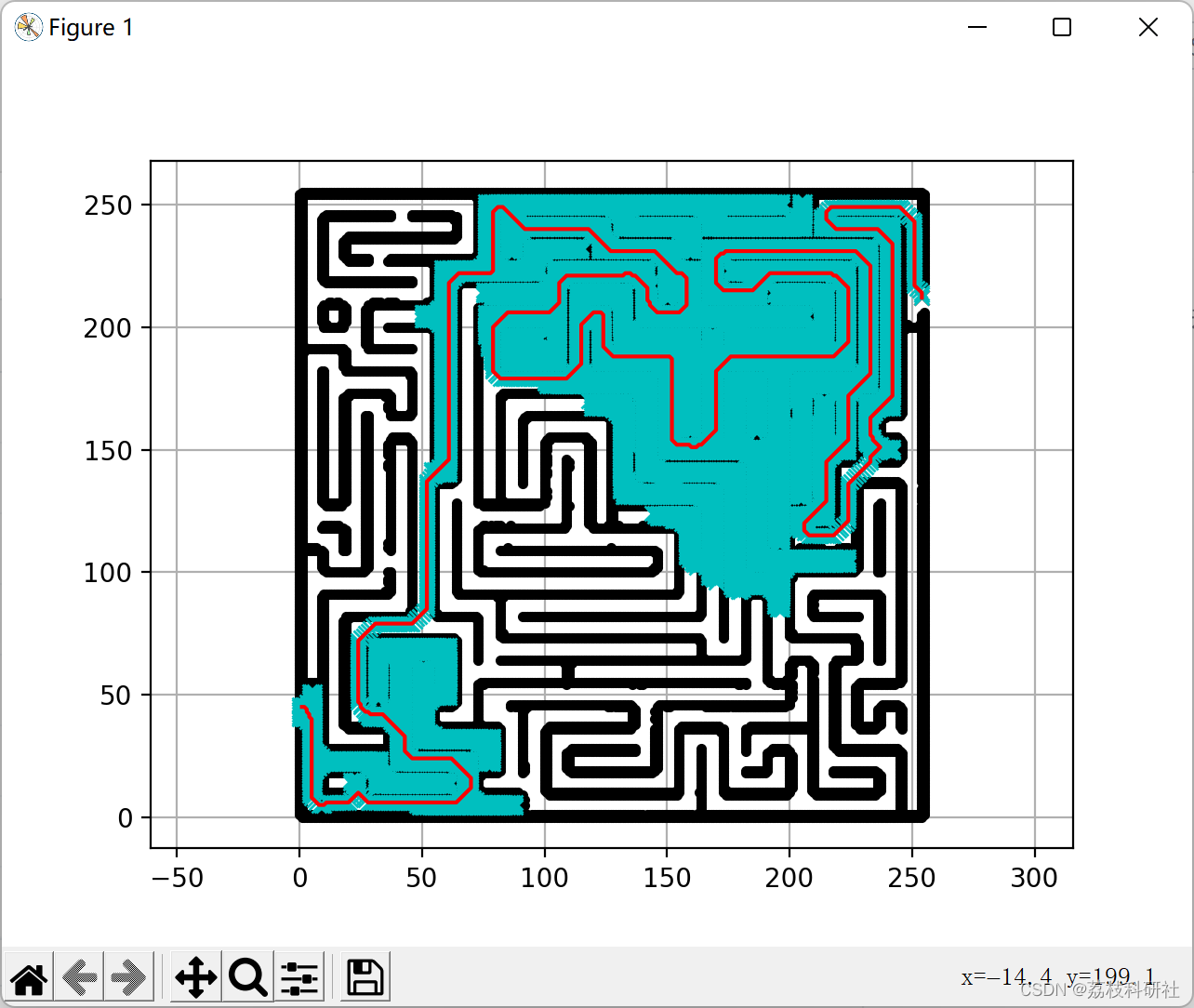
A*:
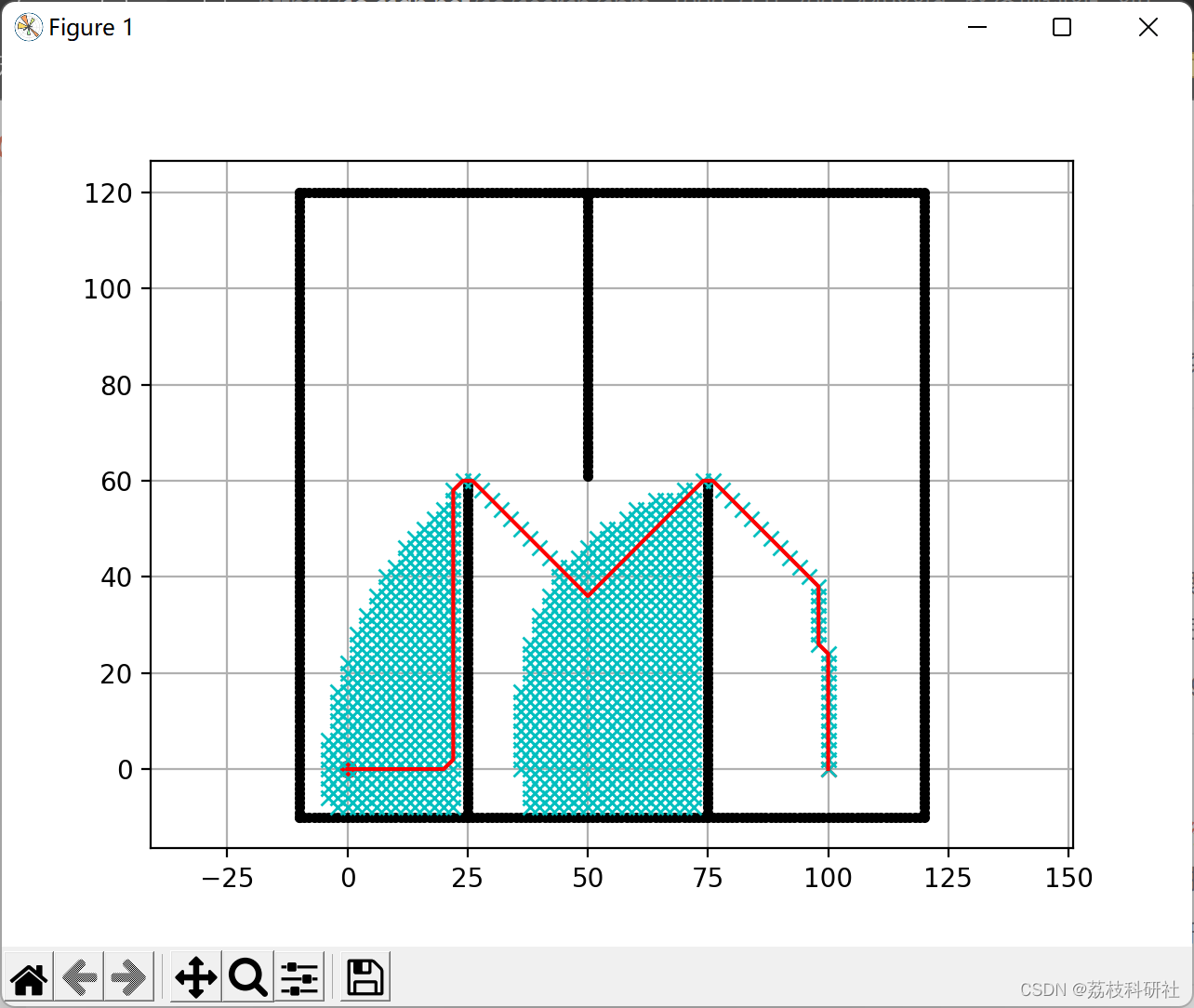
D*:
部分代码:
# show graph
if show_animation: # pragma: no cover
plt.plot(self.calc_grid_position(current.x, self.min_x),
self.calc_grid_position(current.y, self.min_y), "xc")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(
0) if event.key == 'escape' else None])
if len(closed_set.keys()) % 10 == 0:
plt.pause(0.001)
# show graph
if show_animation: # pragma: no cover
plt.plot(self.calc_grid_position(current.x, self.min_x),
self.calc_grid_position(current.y, self.min_y), "xc")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(
0) if event.key == 'escape' else None])
if len(closed_set.keys()) % 10 == 0:
plt.pause(0.001)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]张希闻,肖本贤.改进D~*算法的移动机器人路径规划[J].传感器与微系统,2018,37(12):52-54+58.DOI:10.13873/J.1000-9787(2018)12-0052-03.
[2]张宇航,陈志军,吴超仲,钱闯,熊盛光. 基于改进A~*算法的电动汽车节能路径规划[C]//.第十七届中国智能交通年会科技论文集.,2022:64-65.DOI:10.26914/c.cnkihy.2022.053514.
[3]致谢:Atsushi Sakai(@Atsushi_twi)
🌈4 Python代码实现

2万人民币佣金等你来拿,中德社区发起者X.Lab,联合德国优秀企业对接开发项目,领取项目得佣金!!!
更多推荐

 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)